The left fixed point is a stable point, while the right FP is unstable.
Linear Stability Analysis
In order to know the behavior around fixed point linearization is a great method to analyze.
Let be a fixed point, and let be a small perturbation away from . To see whether the perturbation grows or decays, we derive a differential equation for . Differentiation yields
since is constant. Thus . Now using Taylor’s expansion we obtain
where denotes quadratically small terms in . Finally, note that since is a fixed point. Hence
Now if , the terms are negligible and we may write the approximation
This is a linear equation in , and is called the linearization about x*. It shows that the perturbation:
Potentials
There’s another way to visualize the dynamics of the first-order system: potential is defined by
Consider the relation between potential and time , by using chain rule we have
since , we obtain
The equilibrium point happens at , the remains constant. Since implies .
Example
Graph the potential for the system , and identify all equilibrium points.
Solving yields
Once again we set . Figure shows the graph of . The local minima at correspond to stable equilibria, and the local maximum at corresponds to an unstable equilibrium.
Some people say that an exchange of stabilities has taken place between the two fixed points.
Pitchfork Bifurcation
This bifurcation is common in physical problems that have a symmetry.
Supercritical Pitchfork Bifurcation
Normal Form:
Note that this equation is invariant under the change of variables .
One stable splitting two stable and one unstable.
Subcritical Pitchfork Bifurcation
Normal Form:
One stable and two unstable to one stable.
Dimensional Analysis
Non-dimensionalization
Differential equations that show up in modeling “real world situations” usually have many constants in them. Often one can reduce the number of constants in a problem by choosing the right units for the various quantities in the problem. In the other words, we can convert the variables to ratio that has no unit to analyze multiple different coefficient problems.
We define a dimensionless time by
where is dimensionless time, is dimensional time, is characteristic time scale. We need to choose very carefully to do the non-dimensionalization.
Timescale
is the rate of growth. is timescales of growth.
Example 1
Suppose that a quantity changes in time according to the ODE
The coefficients , , and must all have different units, otherwise we could not add the terms , , and .
To simplify the equation we choose a constant value for , let's say , and we let this value be our unit. The ratio
has no units. In the same way we can pick a unit of time and introduce the quantity
which also has no units.
The quantities and are nondimensionalized versions of our original variables and . The point of nondimensionalization is that we can now derive a differential equation for and , and then afterwards figure out which choice of the units and simplifies things most.
In this example we substitute
which leads to
by the chain rule, and
by direct substitution. The differential equation (1) for and is therefore equivalent with
and thus
At this point we choose and . We can try to make the constant term and the coefficient of both equal to 1. If and then this is possible provided we choose
The coefficient of then becomes
and we get the following differential equation for as a function of :
This is a nondimensionalized version of equation (1). Note that instead of three undetermined parameters it only has one parameter, namely .
Example 2
The Logistic equation:
where is population, is time, growth rate, carrying capacity.
The non-dimensionalize term:
Thus, we have
when and .
Two-Dimensional System
General form
system:
Example
Let , , then we have
Linear form
where are . Let , , so we have .
The fixed points: when or .
Uncoupled System
Consider the system
Notice = the trajectory is different and depends on :
Classified these cases: Stable node, Stable star, stable node, line of fixed points, saddle point
Stability Technology
When is a fixed point:
is attracting if all trajectories near approach it as .
is globally attracting if all trajectories approach it as .
is Lyapunov stable if all trajectories that start sufficiently close to remain close for all time
There are three cases to help understand:
Attracting but not Lyapunov Stable
Lyapunov Stable but not attracting
Attracting and Lyapunov is Stable Start case.
General Linear System
Consider following form
Note: The straight-line trajectories is if then which is stays on -axis.
Now let's generalize this idea. Let's guess , hence is the growth rate and is the direction of growth (the vector).
So, implies and
So, is an eigenvector and is an eigenvalue. is an eigensolution.
2D Eigenvalues
Definition
Then the this singular matrix has determinant zero:
Thus, , , and .
The eigenvectors are when you plug the eigenvalues back to the original form.
Note: ,
System form
When the general form of the system is
Example
For linear system:
we have and . Then the , , so gives and .
So, by plugging backs to determent equation, we have
By set I get . Therefore the general solution is
Phase diagrams & Fixed Points
Normal Cases
The different are right below:
(top left), top right, (down left), (down right).
Remark: When is the a line of stable FPs(reverse arrow for ).
Spacial Cases
When , there are two possible cases:
There are two independent eigenvectors .
This will lead the to , so the diagram would be Star node. If , stable star. If , unstable star. When , all points are fixed points.
There is only one eigenvector.
Only eigenvector would be thus the eigenvector is . This is called degenerative node
This graph is with and .
If we have where the is complex conjugate eigenvalues.
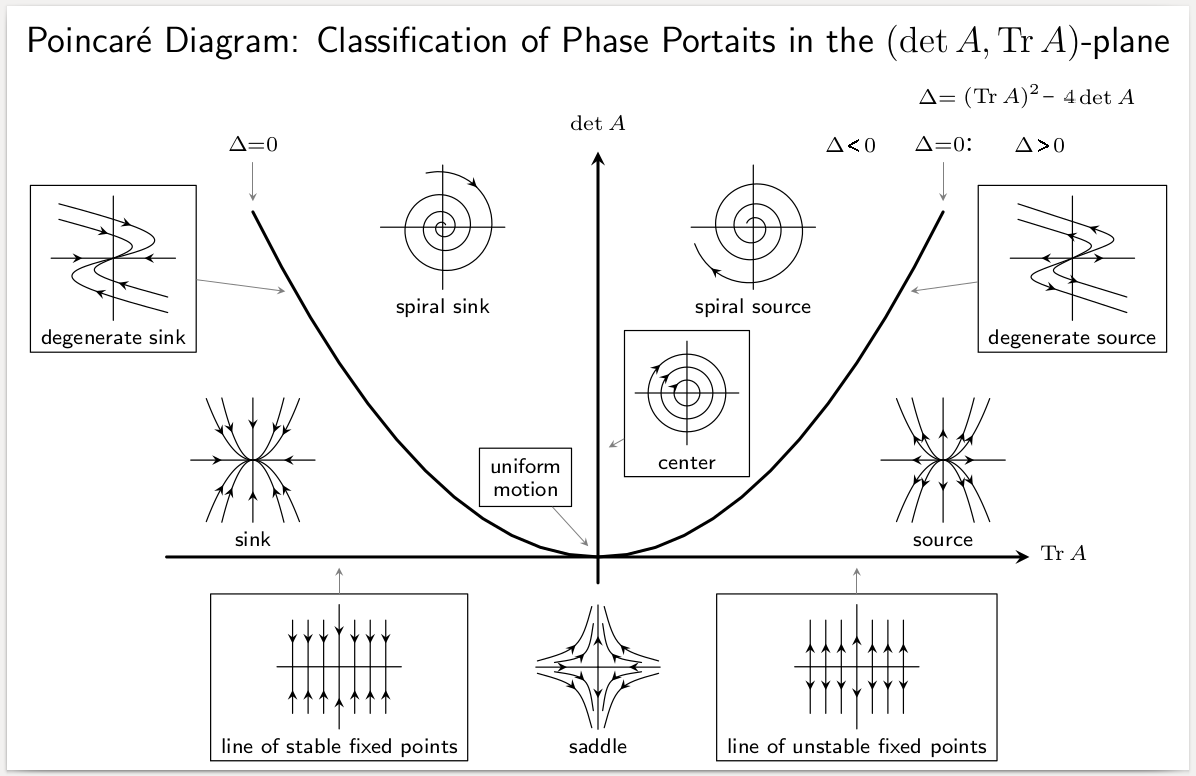
Poincare Diagram
Nullclines
The nullclines are designed as the lines along with not changing (i.e. , ). For example, when , we have and . so it will look like this.
Note:
Not trajectory
Nullclines cross at fixed point
Trajectories are either horizontal or vertical when it at numllclines
System Uniqueness Theorem
Consider the IVP(initial value problem). If and it's partial derivative (Jacobian matrix) are continuous for all in an open-connected set contain of , hence the trajectory has only one solution. No cross point.
Linearization
Consider a general linear system and it's fix point , the perturbation is . Now consider we can use Taylor Expansion to get below:
So under fixed point .
When
Reversible
Many mechanical systems have time-reversal symmetry. This means that their dynamics look the same whether time runs forward or backward. For example, if you were watching a movie of an undamped pendulum swinging back and forth, you wouldn’t see any physical absurdities if the movie were run backward.
The system is reversible if invariant under the mapping of
Time-reversible . We have symmetric along the with different direction of arrows. In other words, for 2D system it such that is odd in and is even in ,aka and .
Invariant under give us it is symmetric along with but the direction of arrow at not change.
Note: Any mechanical systems have time-reversal symmetry. i.e. . is symmetric under time reversal.
Polar Coordinate
Sometimes we cannot justified the centre case, we might trans the system into polar system to analyze. The following example:
Waiting to be filled Week 7 Class 18
Trans to polar system. Let . Then using
For polar system we can determine the limit cycle by let then solved for . If there exist that means there exist circular limit cycle. We also can determine what is the behavior around limit cycle by analyzing the vector field around fixed point for .
is a continuously differentiable vector field on an open set containing ;
does not contain any fixed points; and
There exists a trajectory that is "confined" in , in the sense that it starts in and stays in for all future time.
Then either is a closed orbit, or it spirals toward a closed orbit as . In either case, contains a closed orbit.
Note. The problem of this question is find the trapping region. Here is an example showing how to make it.
Example
Given a system:
Consider as the radius for inner circle, as the radius for outer circle. Then for must such that and for must such that . Thus we have
Thus, to hem in the limit cycle as tightly as we can. For instance, we could pick . (Even works, but more careful reasoning is required.) By a similar argument, the flow is inward on the outer circle if .
Conservation Systems
The energy is often called a conserved quantity, a constant of motion, or a first integral. Systems for which a conserved quantity exists are called conservative systems.
Conservative
is a conservative system. if there exist a real valued function that is constant along trajectories, but non-constant on every open set.
Linear centre implies nonlinear centre.
Process
Let's explain with example. Newton's Second Law is a classic conservation system: . By potential energy we have force as where is the potential energy. Then we have . Now the only thing we need to do is integration. By multiplied we have
Thus, is the energy which is a Conserved Quantity. And the is the Kinetic Energy and is Potential Energy in Physics. It is constant along trajectories.
Note: A conservative system cannot have attracting fixed points. (they are circle)
Check Conservative
Consider a polar system , . Now check if . \begin{proof}
First take the derivative with respect to
\end{proof}
Theorem
(Nonlinear centers for conservative systems) Consider the system , where , and is continuously differentiable. Suppose there exists a conserved quantity and suppose that is an isolated fixed point (i.e., there are no other fixed points in a small neighborhood surrounding ). If is a local minimum of , then all trajectories sufficiently close to are closed.
Index Theory
The index of a closed curve is an integer that measures the winding of the vector field on . The index also provides information about any fixed points that might happen to lie inside the curve.
Then at each point on , the vector field makes a well-defined angle with the positive -axis.
Then the index of the closed curve with respect to the vector field is defined as
Given the ordered directions rotate once counterclockwise as we go in increasing order from vector to vector . Hence . Of course the clockwise is . The example of is
Properties
Suppose that can be continuously deformed into without passing through a fixed point. Then .
If doesn’t enclose any fixed points, then .
If we reverse all the arrows in the vector field by changing , the index is unchanged (Invariant).
Suppose that the closed curve is actually a trajectory for the system, i.e., is a closed orbit. Then .
Note. The Invariant set means any trajectory that starts in set stays in for all time.
Theorem 1
If a closed curve surrounds isolated fixed points , then
where is the index of , for .
Theorem 2
Any closed orbit in the phase plane must enclose fixed points whose indices sum to .
\begin{proof}
Let denote the closed orbit. From property above, . Then Theorem 1 implies . \end{proof}
Fact
: Degenerate, Spiral, Centre, Nodes, Stars. : Saddle.
There is no possible to have closed orbit for those fixed points on the straight-line vector space. Since it will always have cross of two orbit.
Invariant
Invariant lines: Every point along the line are also have same direction.
It could happen on fixed points. Let's looks some example:
Example
Let as three fixed point, so there are three linear line . Assume that they are . Then, invariant means are consistency on each .
You can usually plug into to see if they match the .
Also, to know that for , we want to check .
Gradient System
Suppose the system can be written in the form , for some continuously differentiable, single-valued scalar function . Such a system is called a gradient system with potential function .
If we want to know if a system is gradient, we need to check the definition. If the , . Thus let's explain with an example
Example
For system , .
Now we test we have
Then we test we have
Thus we can find a potential function such the conditions. So the system is a gradient system.
Theorem
Closed orbits are impossible in gradient systems.
How to find the Potential function
In 2D, the gradient system such that
Thus, we can use an example to explain it:
Example
Show that there are no closed orbits for the system , . \begin{proof}
The system is a gradient system with potential function . We can see that the , , then we have and . Thus we can find there exist a such the condition of gradient system. \end{proof}
Liapunov Function
consider a system with a fixed point at . Suppose that we can find a Liapunov function, i.e., a continuously differentiable, real-valued function with the following properties:
for all , and . (We say that is positive definite.)
for all . (All trajectories flow “downhill” toward .)
Liapunov function is a "there exist" statement which means you only find one function that such the conditions then you can say it is Liapunov.
Note. means the minimum or maximum stable pr unstable point of the system.
Note. Asymptotic stability means that solutions that start close enough not only remain close enough but also eventually converge to the equilibrium.
Example
For given system , . \begin{proof}
By constructing a Lyapunov function , we can form a suitable for the system. Then we have , by substituting the system we have
When , we have . Thus the system is stable. Since the system is stable, so there is no closed orbits. \end{proof}
Chaos System
Lorenz Equation
Consider the Lorenz Equation:
Here are parameters: is the Prandtl number, is the Rayleigh number, and has no name.
Properties
Nonlinearity
The system has only two nonlinearities, the quadratic terms and .
Symmetry
There is an important symmetry in the Lorenz equations. If we replace in system, the equations stay the same. Hence, if is a solution, so is . In other words, all solutions are either symmetric themselves, or have a symmetric partner.
Volume Contraction
The Lorenz system is dissipative: volumes in phase space contract under the flow.
Pick an arbitrary closed surface of volume in phase space. Think of the points on as initial conditions for trajectories, and let them evolve for an infinitesimal time . Then evolves into a new surface ; what is its volume ?
Let denote the outward normal on . Since is the instantaneous velocity of the points, is the outward normal component of velocity.
Hence
so we obtain
Hence
Finally, we rewrite the integral above by the divergence theorem, and get
For the Lorenz system,
Since the divergence is constant, it reduces to
which has solution
Thus volumes in phase space shrink exponentially fast. The important key here is showing which implies the system is dissipative.
One-Dimensional Map
Fixed Point
The fixed point in one-dimensional map is different from continuity function. The general form of the one-dimensional map is
Thus, we set a point that is always goes to itself . And that would be the fixed point.
Stability Analysis
Similar to continuity function, we also using perturbation to analyze it. To determine the stability of , we consider a nearby orbit and ask whether the orbit is attracted to or repelled from . That is, does the deviation grow or decay as increases? Substitution yields
But since , this equation reduces to
Suppose we can safely neglect the terms. Then we obtain the linearized map with eigenvalue or multiplier .
The solution of this linear map can be found explicitly by writing a few terms: , , and so in general . If , then as and the fixed point is linearly stable. Conversely, if the fixed point is unstable. In mathematics language
There is a special case when multiplier i.e. we call superstable.
Logistic Map
The map is looks like
The fixed points are which are and . Since we only consider the positive, the second fixed point has range of allowable .
By analyzing the stability, we have the multiplier . Thus we have stability for :
and for :
Bifurcation Type
From the map we can easily see that what type at each point:
As we can see, when it is a transcritical bifurcation.
Once, it goes to it is a new bifurcation: flip bifurcation.
Period-p Orbit
Sometimes in logistic map, there is also has period cycle that is not chaos behavior. For p-cycle, we defined as follow: A p-cycle exists iff there are p's points such that . Equivalently, such a must satisfy .
Period 2 Cycle
A 2-cycle exists if and only if there are two points and such that and . Equivalently, such a must satisfy .
To find and , we need to solve the fourth-degree equation . That sounds hard until you realize that the fixed points and are trivial solutions of this equation. (They satisfy , so automatically.) After factoring out the fixed points, the problem reduces to solving a quadratic equation.
Expansion of the equation gives . After factoring out and by long division, and solving the resulting quadratic equation, we obtain a pair of roots
which are real for . Thus a 2-cycle exists for all , as claimed. At , the roots coincide and equal , which shows that the 2-cycle bifurcates continuously from . For the roots are complex, which means that a 2-cycle doesn't exist. In mathematical language
Stability
Now we’re on familiar ground. To determine whether is a stable fixed point of , we compute the multiplier
(Note that the same is obtained at , by the symmetry of the final term above. Hence, when the and branches bifurcate, they must do so simultaneously.)
After carrying out the differentiations and substituting for and , we obtain
Therefore the 2-cycle is linearly stable for , i.e., for .
Lyapunov exponent (one-dimensional map)
We quantified sensitive dependence by defining the Liapunov exponent for a chaotic differential equation. This is example in one-dimensional map
If this expression has a limit as , we define that limit to be the Liapunov exponent for the orbit starting at :
Proof
\begin{proof}
Here's the intuition. Given some initial condition , consider a nearby point , where the initial separation is extremely small. Let be the separation after iterates. If , then is called the Lyapunov exponent. A positive Lyapunov exponent is a signature of chaos.
A more precise and computationally useful formula for can be derived. By taking logarithms and noting that , we obtain
where we’ve taken the limit in the last step. The term inside the logarithm can be expanded by the chain rule:
Hence,
\end{proof}
Example
Suppose that has a stable p-cycle containing the point . Show that the Liapunov exponent . If the cycle is superstable, show that .
As usual, we convert questions about p-cycles of into questions about fixed points of . Since is an element of a p-cycle, is a fixed point of . By assumption, the cycle is stable; hence the multiplier . Therefore , a result that we’ll use in a moment.
Note. since
Next observe that for a p-cycle,
since the same p terms keep appearing in the infinite sum. Finally, using the chain rule in reverse, we obtain
as desired. If the cycle is superstable, then by definition, and thus